 Georgia Tech's entry in the RoboCup Rescue 2007 competition was my
master's project. Click here for more pics and videos. At 300 pounds, it was the largest competitor by far. Unfortunately, the size of the robot and low ground clearance prevented the robot from exploring much of the arena. I designed and machined almost the entire robot myself. I also did quite a bit of systems integration. Our goal was to have better video throughput by using 3 orthogonal radio frequencies as detailed in this paper:
Georgia Tech's entry in the RoboCup Rescue 2007 competition was my
master's project. Click here for more pics and videos. At 300 pounds, it was the largest competitor by far. Unfortunately, the size of the robot and low ground clearance prevented the robot from exploring much of the arena. I designed and machined almost the entire robot myself. I also did quite a bit of systems integration. Our goal was to have better video throughput by using 3 orthogonal radio frequencies as detailed in this paper:
Ben Axelrod, and Can Envarli. (RCom) Reliable Communications for Teleoperated Rescue Robots.
Mobile Manipulator The goal for this project was to get this Kuka arm on a Segway RMP to serve coffee. Details in this paper:
The goal for this project was to get this Kuka arm on a Segway RMP to serve coffee. Details in this paper:
C. Anderson, B. Axelrod, J. Case, J. Choi, M. Engel, G. Gupta, F. Hecht, J. Hutchison, N. Krishnamurthi, J. Lee, H. Nguyen, R. Roberts, J. Rogers, A. Trevor, H. Christensen, C. Kemp. Mobile Manipulation - A Challenge in Integration. In SPIE Defense & Security, 2008.
See also this poster presented at RSS 2007. Some videos here.
My team chose to use Microsoft Robotics Studio as our base platform. I was responsible for the overall service architecture.
Grand Challenge
I participated in a class to help with Georgia Tech's DARPA Urban Grand Challenge entry. I primarily worked on lane finding through example.
This video demonstrates some proof of concept code detecting the road, yellow lane lines, white lane lines, and the image's vanishing point with simple color segmentation. Segmentation technique inspired by James Bruce's CMVision. Computer VisionHere are some interesting projects I did in a Computer Vision class with Frank Dellaert.
 This is a homography of some buildings on the Georgia Tech campus.
This is a homography of some buildings on the Georgia Tech campus.
 I wrote a neural network based face detector. See this paper for more info.
I wrote a neural network based face detector. See this paper for more info.
 I developed a new
machine learning algorithm called P-BOT with Steve Campos and
Can
Envarli formy machine learning class (cs7641) under
CharlesIsbell.
It is a perceptron tree. (It is a decision tree
with a
perceptron network in the nodes of the tree). Here are some slides to further explain.
We wrote it in C++ from scratch.
I developed a new
machine learning algorithm called P-BOT with Steve Campos and
Can
Envarli formy machine learning class (cs7641) under
CharlesIsbell.
It is a perceptron tree. (It is a decision tree
with a
perceptron network in the nodes of the tree). Here are some slides to further explain.
We wrote it in C++ from scratch.
 I did some research with
Keith
O'Hara, under the advisement of Tucker
Balch, on a distributed sensor network platform called the GNATs. I investigated techniques to allow the GNATs to choose which state to be in depending on the states of their neighbors. The full algorithm is described in these slides. I did experiments on the GNAT hardware as well as simulations using MASON which I turned into a cool Java applet:
I did some research with
Keith
O'Hara, under the advisement of Tucker
Balch, on a distributed sensor network platform called the GNATs. I investigated techniques to allow the GNATs to choose which state to be in depending on the states of their neighbors. The full algorithm is described in these slides. I did experiments on the GNAT hardware as well as simulations using MASON which I turned into a cool Java applet:
Note: the applet requires a Java version 1.5 or greater browser plugin. The start of the simulation goes rather slow, please let it run for a minute or two to see the behavior. If you do not see the applet button above, or have errors, you may need to install the latest Java plugin.
I also investigated time synchronization schemes with Karsten Schwan. Details in this paper: Reference Broadcast Time Averaging.
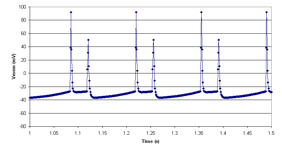 I used a genetic algorithm to evolve bursting
pacemaker neurons and determine
the minimal number of ion channels and other parameters needed.
Artificial neurons are useful in legged robot locomotion
with
Central Pattern Generators. This work was done at the University of Illinois with
David
Goldberg, while I was working at Iguana Robotics. See report: Evolving Minimal Bursting Pacemaker Neurons.
I used a genetic algorithm to evolve bursting
pacemaker neurons and determine
the minimal number of ion channels and other parameters needed.
Artificial neurons are useful in legged robot locomotion
with
Central Pattern Generators. This work was done at the University of Illinois with
David
Goldberg, while I was working at Iguana Robotics. See report: Evolving Minimal Bursting Pacemaker Neurons.
 I was the team leader
of my senior design project at Syracuse University in which we built an eight legged hobby
servo driven robot. Here
is a brief report
about
our work and the robot. And here is a full
size picture.
I was the team leader
of my senior design project at Syracuse University in which we built an eight legged hobby
servo driven robot. Here
is a brief report
about
our work and the robot. And here is a full
size picture.
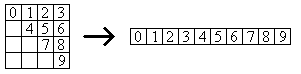 This is a small
function I wrote to cut
the amount of storage required for a 2D triangular matrix in half.
A triangular matrix is when you have a distance matrix, or
some
other symmetric data where the matrix is equal to its own transpose.
For example, cell (1,2) is equal to cell (2,1).
With this
function, you can use a 1D array to store only half of the matrix.
There are actually two functions, one for each of two cases,
when
the row index is allowed to be equal to the column index, and when it
isn't.
This is a small
function I wrote to cut
the amount of storage required for a 2D triangular matrix in half.
A triangular matrix is when you have a distance matrix, or
some
other symmetric data where the matrix is equal to its own transpose.
For example, cell (1,2) is equal to cell (2,1).
With this
function, you can use a 1D array to store only half of the matrix.
There are actually two functions, one for each of two cases,
when
the row index is allowed to be equal to the column index, and when it
isn't.
 Although not really for
school, I wrote a large number of programs
for my TI-83 graphing
calculator. They are mostly
engineering related, and several are very advanced. I have
programs that can:
Although not really for
school, I wrote a large number of programs
for my TI-83 graphing
calculator. They are mostly
engineering related, and several are very advanced. I have
programs that can:
- find the nodal displacements, reactions at the supports, stresses, and strains in all the axial force members of a 2D statically indeterminate truss
- find the displacements and reactions at the support of an axially loaded column
- find the centroid and second moment of cross-section (composed of elementary shapes)
- perform mesh analysis on planar circuits
- provide a 9x9 board to play Go on (pictured above)
- play the classic game of Simon